

ADELPHI, Md. -- The U.S. Army Combat Capabilities Development Command’s Army Research Laboratory released a software suite that simulates the dangerous and unpredictable conditions of an underground tunnel network. Researchers interested in developing robots for subterranean environments can now use this software suite to virtually test new capabilities and techniques.
Autonomous robots have made steady progress in various environments above ground; however, scientists and engineers have yet to fully overcome the unique challenges found in underground locations, such as human-made tunnel systems and natural cave networks.
Army researchers believe that their software suite can facilitate the development of robots that can exploit underground environments and solve problems below the Earth’s surface.
“Subterranean robots could one day be useful for mining disaster recovery, in future events like the Chilean mine collapse in 2010 as well as coal mining disasters we’ve had in the United States in the past,” said Dr. John Rogers, an Army research scientist within the laboratory’s Intelligence for Robotics branch. “In addition to disaster relief, this is a very Army-relevant problem. For any sort of tunnel operation, you might want to send robots into an unknown subterranean structure to gather information before you send Soldiers in.”
The software suite contains a dataset that simulates the subterranean environment of a Pittsburgh research mine, Army researchers said. Referred to as the SubT-Tunnel dataset, its simulation replicates the objective of the 2019 DARPA Subterranean Challenge Tunnel Circuit.
The dataset virtually positions an autonomous robot system at the entrance of an underground maze and determines how well it can obtain the location of five different types of items placed throughout the underground system.
With the SubT-Tunnel dataset, Rogers and his colleagues want to see the various solutions that people come up with for a problem known as simultaneous localization and mapping, or SLAM, in a subterranean environment.
“Localization means keeping track of where you are in the known world, and mapping is the process of building a map of somewhere when you know where you are,” Rogers said. “SLAM is a classical problem in robotics where you can do one or the other quite easily but doing both simultaneously is very difficult.”
According to Rogers, commercial approaches often rely on GPS to address the SLAM problem, but robots can’t receive satellite signals underground. As a result, the Army has a vested interest in how other teams choose to overcome this obstacle in addition to a few other considerations.
“Typically, robot mapping technology is judged in terms of relative accuracy, where the location of the target is dependent on context clues like the location of surrounding objects,” Rogers said. “[But we] wanted to emphasize this notion of absolute accuracy, so we can have one global frame of reference that we can use to pinpoint targets on an x-y-z coordinate.”
The decision to prioritize absolute accuracy over relative accuracy stems from the fact that many external interactions with underground tunnels, such as drilling from above to ventilate or provide emergency supplies to survivors during an accident, require accurate absolute estimates of the survivors’ locations, the experts said.
Users can implement their approach to the SLAM problem in the SubT-Tunnel dataset and gauge how well it locates and maps the robot as it travels through the underground maze through a points-based system.
The simulation scores the performance of the robot and its SLAM approach based on how many items the robot finds and pinpoints on a map. At the same time, the SubT-Tunnel dataset also keeps track of other parameters of interest, such as how close the robot managed to get to each of the artifacts in finer grain detail.
“The software suite contains instructions on how to load your SLAM system into the dataset,” Rogers said. “There’s also a program running on the side that determines how well that SLAM technique tracks the location of the robot. Whenever the robot sees something, the user knows exactly how accurate their SLAM was at that moment in time.”
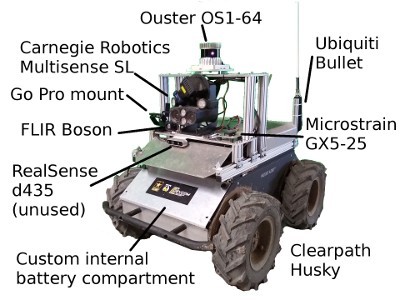
Army researchers created the SubT-Tunnel dataset to accommodate a wide variety of SLAM approaches. The dataset consists of laser-scan data taken from a robot’s point of view as it was driven through the underground maze. In addition to LiDAR data, their robot also collected metrics such as camera feed, inertial measurement units and wheel odometry.
Once they built the SubT-Tunnel dataset, Rogers and his colleagues used it to test several approaches, including Google’s Cartographer and even the laboratory’s original OmniMapper software program.
“We wanted to have a diversity of different types of data so that other approaches can be evaluated and not just ones that were the most similar to the way we do SLAM,” Rogers said. “With the SubT-Tunnel dataset, anyone can plug in their own implementation of SLAM and then be able to evaluate how well they would have been able to score on the Subterranean Challenge.”
Army researchers published their research paper, Test Your SLAM! The SubT-Tunnel dataset and metric for mapping, in the 2020 IEEE International Conference on Robotics and Automation.
The SubT-Tunnel dataset and the supporting code repository is available online.

CCDC Army Research Laboratory is an element of the U.S. Army Combat Capabilities Development Command. As the Army’s corporate research laboratory, ARL discovers, innovates and transitions science and technology to ensure dominant strategic land power. Through collaboration across the command’s core technical competencies, CCDC leads in the discovery, development and delivery of the technology-based capabilities required to make Soldiers more lethal to win the nation’s wars and come home safely. CCDC is a major subordinate command of the U.S. Army Futures Command.
Social Sharing